HULL DESIGN
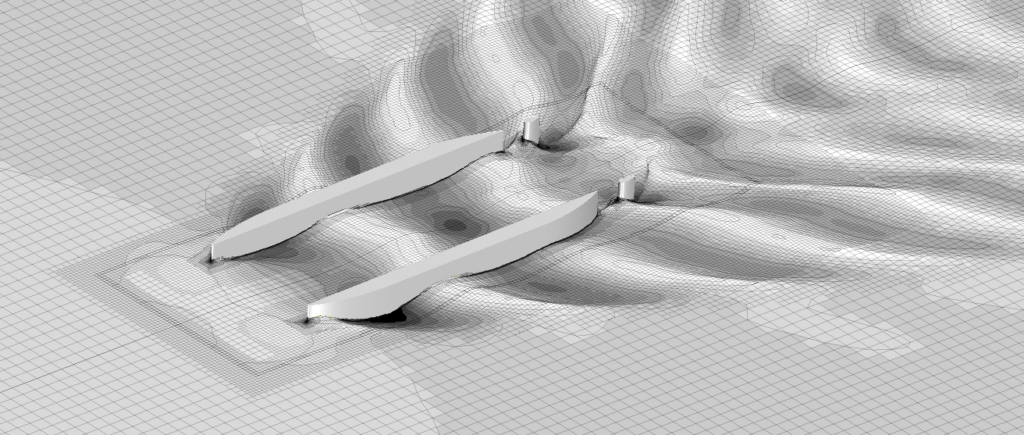
The 60m twin-hull ship is designed to minimise the hull cross section area at the sea’s surface. The greatest benefit of this is that the waves have much less of an effect on the vessel, so it does not react as much to a heavy sea state. This improved seakeeping characteristics of the SWATH concept means there is a much more stable platform compared to a traditional monohull SOV, useful when approaching wind turbines and for safe crew transfers in waves.
The bulk of the displacement is located beneath the waves, where it is less affected by wave action. The design of SWATH is considerably more complex due to the structural complexities inherent to the design. With high surface drag, yet low wave drag, the SWATH is less susceptible to wave motion, but more sensitive to payload, which affects the pitch and the draught.
FUEL EFFICIENCY
The vessels second generation Dynamic Positioning (DP2) technology means that the vessel can hold its position in rough seas but at the same time operate with lower fuel consumption when compared to traditional SOVs. An impressive fuel consumption reduction of up to 50% can be achieved compared to a monohull SOV, further reducing the cost of wind farm maintenance. In line with her green credentials, environmental considerations are integral to the vessel design and include a waste heat recovery system and a Clean Design notation.